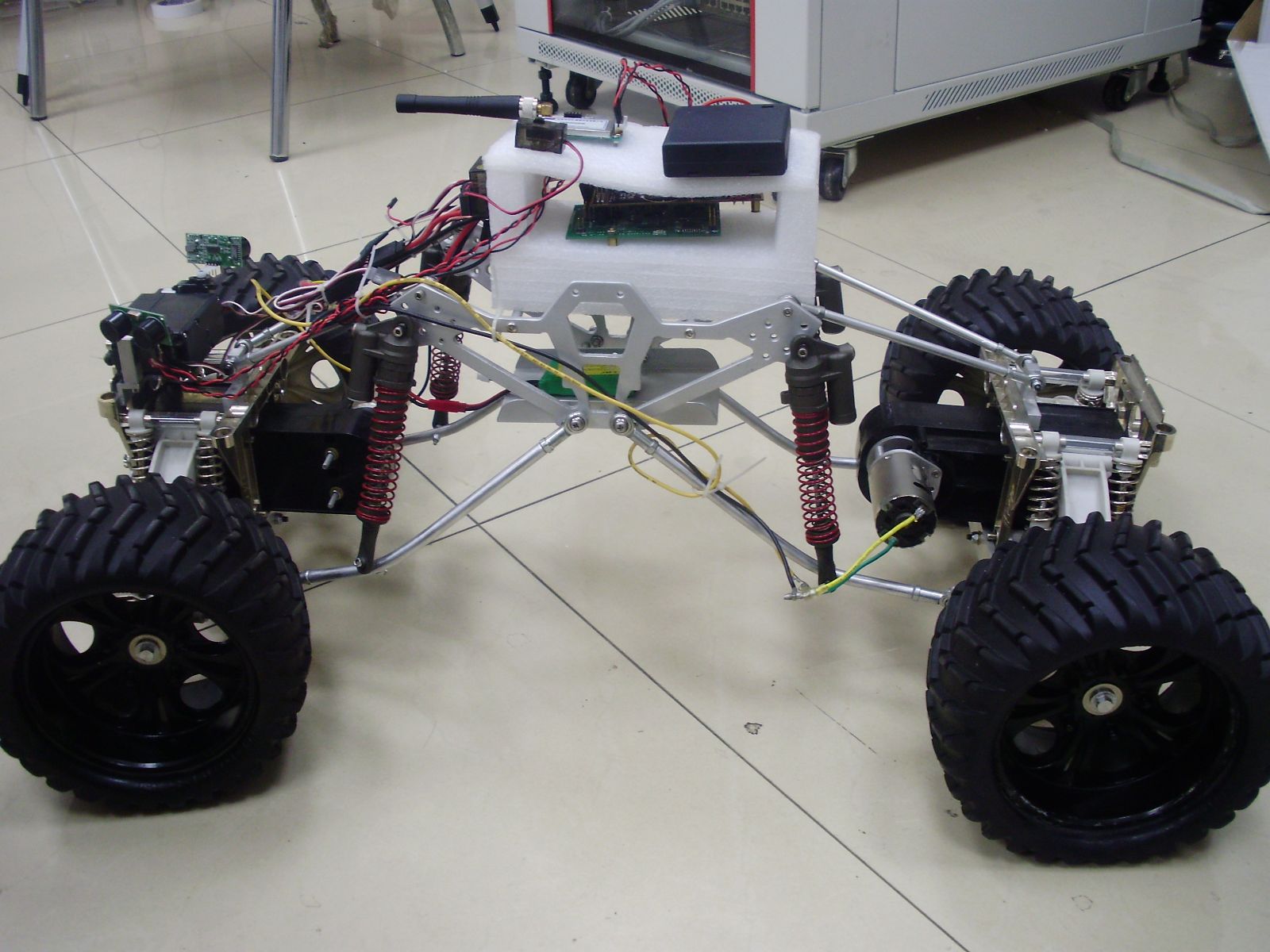
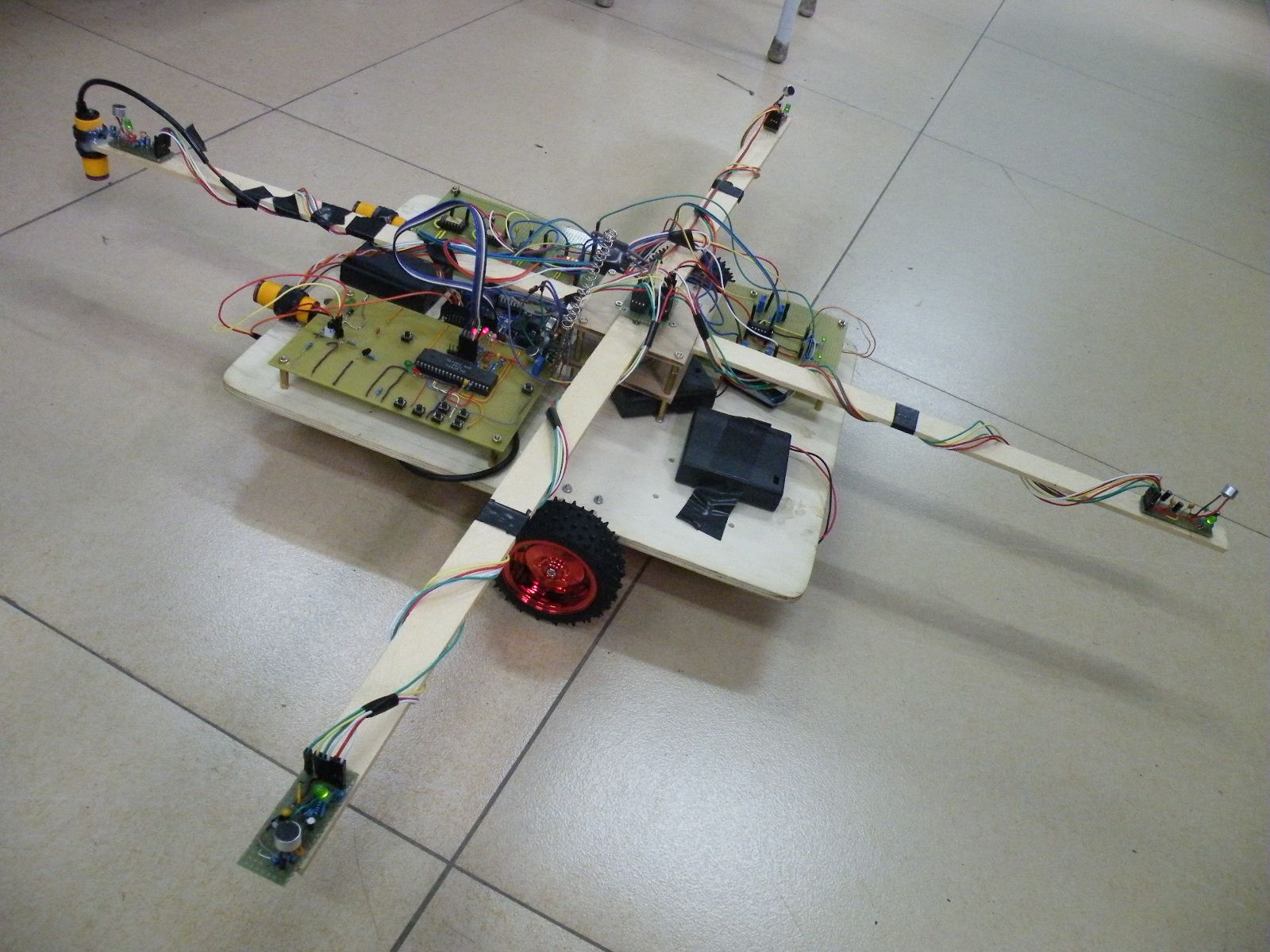
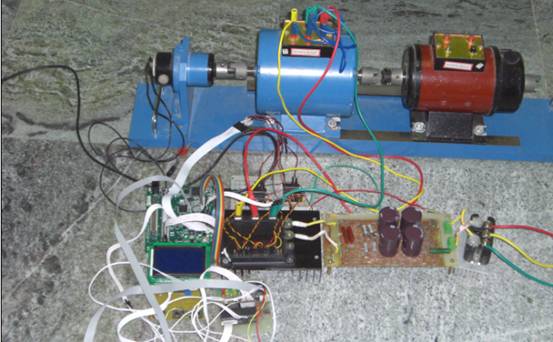
頭條 一种低功耗便携式宽带射频信号检测笔的设计 以便携性低功耗为出发点,创新性地首次提出了检测笔形态的便携式射频信号简易测试仪,以解决高寒、高空、高热或者高海拔地区等特殊环境下检修通信设备时,携带常规实验室测试设备存在不便操作、危险性较高、插电困难等难题,该检测笔一方面显著减轻了恶劣环境中携带复杂检测仪器的负担,另一方可以将节约出来的空间和精力携带其他重要的工作物件。经试验测试,该检测笔能实现对频率为1 GHz~23 GHz、功率范围在-45 dBm~+3 dBm的射频信号的有效检测,试验结果与理论设计一致,验证了该方法的可行性和高效性。 最新視頻 【视频】基于ADSP-BF533教学型三自由度并联数控雕刻机数控系统开发 本项目开发了基于ADSP-BF533教学型三自由度并联数控雕刻机的数控系统。该系统以ADSP为核心处理器,构建“PC机+ADSP”的数控系统硬件平台。上位PC机采用Visual C++开发软件平台,可识别G代码和CorelDraw代码;下位机ADSP采用C语言开发驱动软件,实现对三个电机联动控制;上下位机通过RS232实现实时通讯。通过联机调试,实现了正确加工轨迹,验证了本项目机构分析的正确性和数控系统的可行性。 發(fā)表于:2011/6/23 【视频】基于皮肤肌电信号模式分类的仿生手系统 本项目以ADI模拟器件,ADSP-BF533处理器为主开发了基于皮肤肌电信号的仿生手系统。本系统通过镀银表贴电极采集皮肤肌电信号,经过工频陷波、带通滤波多级放大后,通过模/数转换芯片将肌电信号数字化并送入到DSP中。采用小波包变换提取表面肌电(surface ElectroMyoGraphy,sEMG)信号特征向量,并以之为基准实现前臂的动作模式分类。根据判别结果产生相应的控制信号,驱动由AX-12+数字舵机构成的假肢作出相应的动作。 發(fā)表于:2011/6/23 【视频】基于人眼定位的3D显示器 本系统是一个基于人眼定位的3D显示器,它能根据人眼位置的变化实时更新屏幕绘制,从而使人产生观看真实3D物体的体验。系统通过摄像头拍摄人脸图像,用人脸检测的方法定位人眼,通过空间变换计算出人眼的3D位置,最后用中心投影绘制3D线框模型。人脸检测方法采用基于Haar特征的Adaboost算法。我们利用有限的DSP资源稳定地实现了这个系统,并做了大量的算法改进以及基于平台的优化,极大地提高了性能。 發(fā)表于:2011/6/23 【视频】导盲眼镜 本项目以ADSP-BF561为核心处理器,以uClinux为操作系统,通过基于数据分割的 双核并行运算,实现两路摄像头图像信息的高速处理,进而建立了导盲眼镜平台。本系统实 现了条形盲道、盲道警示砖、斑马线和交通灯的实时检测,并综合计算出盲人行走所需的信 息,语音提示盲人找到盲道、在盲道上正确行走并转向、在盲人遇到十字路口时,给出相应 提示,为盲人出行提供必要的安全保障,具有明显的社会意义和可观的市场价值。 發(fā)表于:2011/6/23 【视频】基于结构光双目视觉的智能机器人系统 本系统基于ADSP-BF548处理器设计并实现了具有结构光双目视觉的四足可变形仿生机器人系统。本系统配置了两路摄像头、3路iMEMS传感器和电子罗盘的信息采集接口,并实现对机器人平台状态和行为控制。本系统基于DSP处理器实现了结构光双目视觉实时信息采集与处理,具备自身姿态和方位感知能力,能够实现较高精度的环境测量和自适应控制。 發(fā)表于:2011/6/23 【视频】德州仪器:TMS320DM365 数字媒体处理器示例 TMS320DM365 数字媒体处理器示例 發(fā)表于:2011/6/22 【视频】汽车自动入库系统的设计展示 本项目设计一种基于超声波扫描测距和磁强计加速度计姿态测量的嵌入式自动倒车入位系统。在车辆上安装超声波扫描测距装置,通过扫描多点测量,获取车位位置尺寸信息,车载磁强计加速度计组成车辆的导航系统,获取车辆的位置航向信息。该设计基于对理想泊车路径的规划,通过BF537数字信号处理器作为主控单元对车辆的运动进行控制,实现了在垂直泊车环境下的安全泊车任务。但由于时间的限制,本次设计没有完成平行泊车环境的泊车任务,有待在今后的研究中解决。 發(fā)表于:2011/6/21 【视频】基于单片机的声音测距声控小车展示 随着科技的发展,我们对于科技产品人性化的要求越来越高,我们是否可以将语音定位、声音识别、避障、避崖结合一体呢?文主要介绍一款基于ADuC7026单片机的语音识别和声音定位小车。在详细介绍了小车的硬件结构、模块分配以及各个模块的原理和功能指标后,分三个模块分别介绍具体功能以及使用前景。最后,介绍了单片机软件程序以及程序的流程。 發(fā)表于:2011/6/21 【视频】基于ADSP-BF533的魔幻相机的设计 本项目设计了一种高度集成化的微小型机器视觉系统——魔幻相机。系统通过对CMOS摄像头快速采集的图像进行处理,采用改进算法进行二值化处理后再基于图像灰度期望值为阈值进行头像提取,然后利用改进的基于灰度图像的镜像对称性度量算法对采集的图像灰度值分布进行对称性计算,最后通过人眼状态分析辅助判断出质量最优的照片。将图像的采集、处理与通信功能集成于系统中,实现无人值守操作,功能算法的可扩展性可满足多种视觉模式的应用需求。 發(fā)表于:2011/6/21 【视频】基于DSP技术的交流伺服运动控制系统展示 随着计算机技术和交流调速技术的飞速发展,现代交流伺服系统的发展日新月异,各种控制方法和调速手段得以应用于实际的控制系统中,使得现代伺服系统朝着小型化,智能化,高速高精度的方向发展,本文旨在为普通的交流异步电机开发一套伺服系统。交流感应电机因其结构简单,价格低廉,维护方便,并且通过采用先进的控制技术可具备良好的静、动态性能,因而在高性能伺服驱动系统中广泛应用。伺服驱动系统需要快速的动态响应,良好的抗干扰能力以及对参数变化具有鲁棒性,而影响这些因素的关键之一就是位置/速度传感器。所以,电机无位置/速度传感器控制己成为一个研究的热点。 本文以ADI公司的BF506 EZ-KIT为核心,采用转子磁场定向矢量控制(FOC)理论,以及扩展的卡尔曼滤波(EKF)算法,设计了一种基于DSP的传感器伺服感应电机矢量控制系统。硬件主要由交流异步电动机、控制单元(DSP芯片及其外围电路)、无线控制单元、光电隔离单元、功率驱动单元、IGBT模块单元、接口通讯及显示单元组成。本方案设计的伺服系统软件由位置环、速度环和电流环组成,在异步电机矢量控制原理的基础上设计了控制系统的速度环及电流环,以实现闭环控制。如果在电机系统中加入速度、位置传感器,不但增加了系统的成本和安装的困难,而且降低了系统的机械鲁棒性,阻碍了电机向高速化、小型化的发展,因此,无传感器技术的研究具有重要的实际意义。 發(fā)表于:2011/6/21 <…76777879808182838485…>